Direct LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM
K. Chen, R. Nemiroff, and B.T. Lopez, “Direct LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM,” arXiv preprint arXiv:2305.01843, 2023.
Abstract
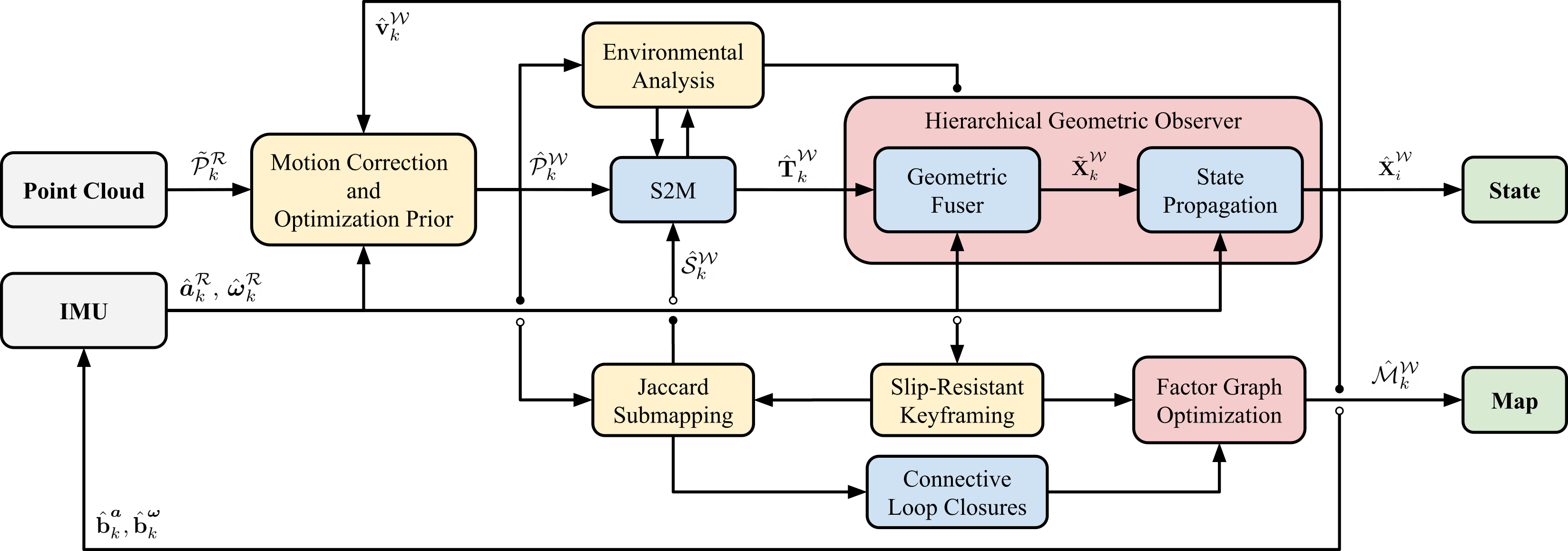
This paper presents Direct LiDAR-Inertial Odometry and Mapping (DLIOM), a robust SLAM algorithm with an explicit focus on computational efficiency, operational reliability, and real-world efficacy. DLIOM contains several key algorithmic innovations in both the front-end and back-end subsystems to design a resilient LiDAR-inertial architecture that is perceptive to the environment and produces accurate localization and high-fidelity 3D mapping for autonomous robotic platforms. Our ideas spawned after a deep investigation into modern LiDAR SLAM systems and their inabilities to generalize across different operating environments, in which we address several common algorithmic failure points by means of proactive safe-guards to provide long-term operational reliability in the unstructured real world. We detail several important innovations to localization accuracy and mapping resiliency distributed throughout a typical LiDAR SLAM pipeline to comprehensively increase algorithmic speed, accuracy, and robustness. In addition, we discuss insights gained from our ground-up approach while implementing such a complex system for real-time state estimation on resource-constrained systems, and we experimentally show the increased performance of our method as compared to the current state-of-the-art on both public benchmark and self-collected datasets.